Hมีความยืดหยุ่นสูง สามารถสร้างโมเดลสามมิติแข็งใดๆ ที่มีโครงสร้างที่ซับซ้อนใดๆ ได้ และต้นทุนการผลิตแทบไม่ขึ้นอยู่กับความซับซ้อนของผลิตภัณฑ์
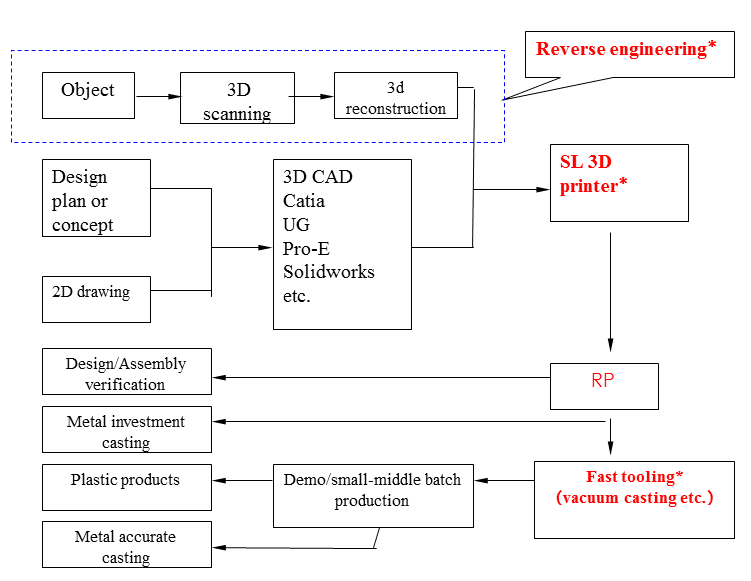
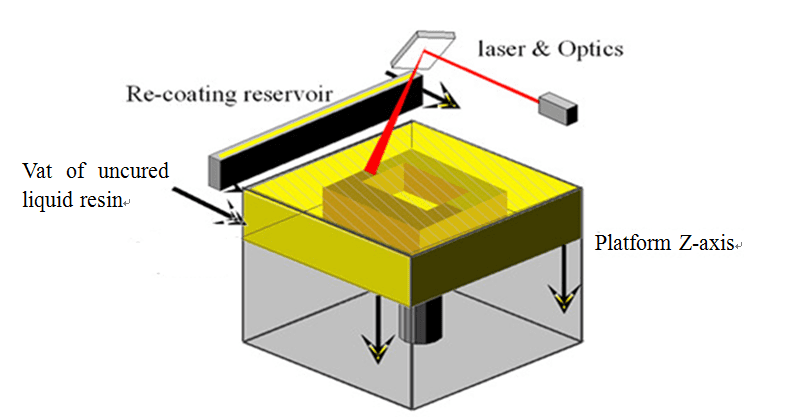
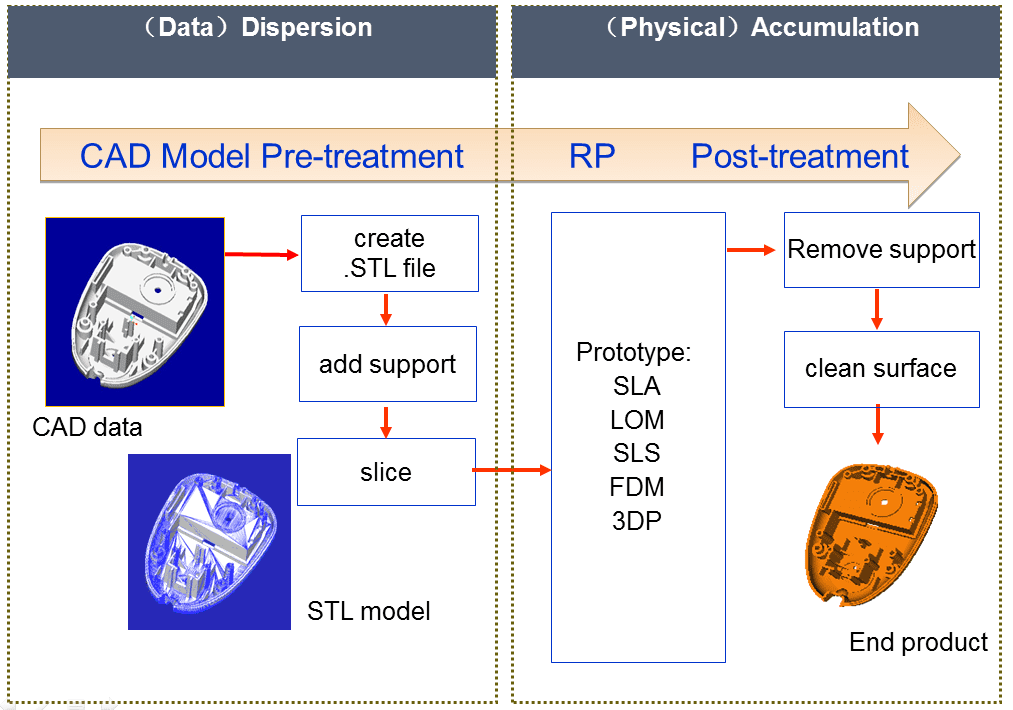
Cการขับขี่โดยตรงของโมเดล AD กระบวนการขึ้นรูปเป็นแบบดิจิทัลโดยสมบูรณ์ ไม่ต้องติดตั้งหรือเครื่องมือพิเศษใดๆ และการออกแบบและการผลิต (CAD/CAM) ได้รับการบูรณาการอย่างมาก
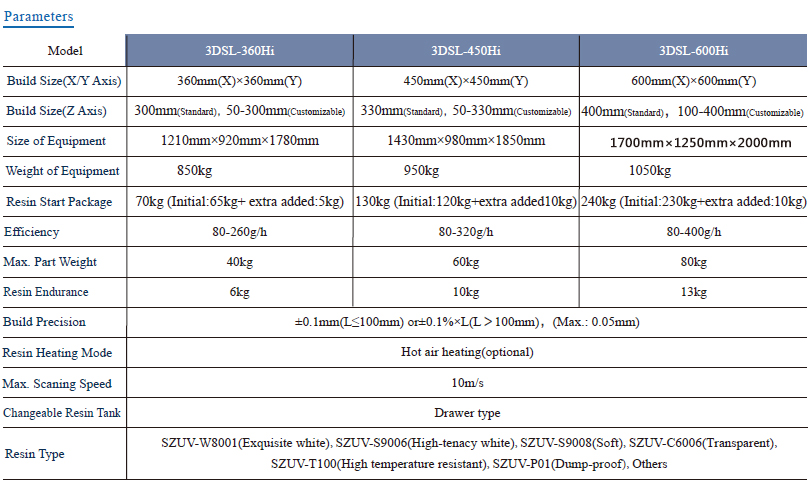
Hความแม่นยำสูง ± 0.1%
Hลดขนาดลงอย่างมาก สามารถสร้างรายละเอียดได้ละเอียดมาก ผนังบาง
Mคุณภาพพื้นผิวแบบเก่านั้นยอดเยี่ยม
Fความเร็วสูงสุด
Hเป็นอัตโนมัติสูง: กระบวนการนี้เป็นแบบอัตโนมัติทั้งหมด กระบวนการนี้ไม่จำเป็นต้องอาศัยการแทรกแซงของมนุษย์ และอุปกรณ์สามารถไม่ต้องดูแล