




ปรับแต่งเครื่องสแกน 3 มิติ 4 ตาด้วยเลนส์กล้อง 4 กลุ่ม ซึ่งสามารถเลือกและเลื่อนได้ตามขนาดของวัตถุและพื้นผิวโดยละเอียดของพื้นผิววัตถุ การสแกนที่แม่นยำทั้งขนาดใหญ่และขนาดเล็กสามารถทำได้พร้อมกันโดยไม่ต้องปรับใหม่หรือแบ่งเขตเลนส์กล้องใหม่ ปรับแต่งซีรี่ส์ 4 ตาด้วยเครื่องสแกน 3 มิติแสงสีขาวและแสงสีน้ำเงิน
เครื่องสแกน 3 มิติแบบใช้แสงที่มีโครงสร้าง - 3DSS-CUST4M-III

ข้อมูลเบื้องต้นเกี่ยวกับเครื่องสแกน 3D
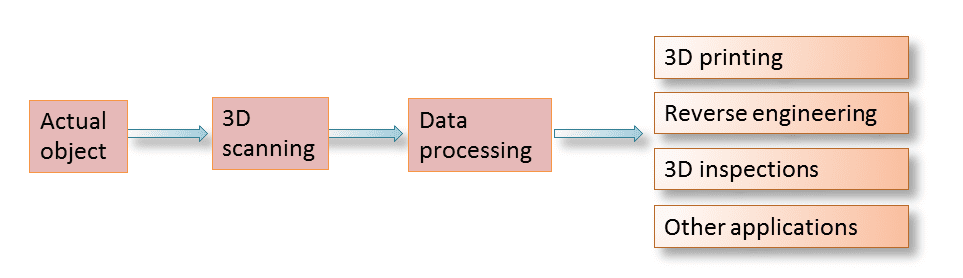
สแกนเนอร์ 3 มิติเป็นเครื่องมือทางวิทยาศาสตร์ที่ใช้ในการตรวจจับและวิเคราะห์ข้อมูลรูปร่างและลักษณะของวัตถุหรือสภาพแวดล้อมในโลกแห่งความเป็นจริง รวมถึงเรขาคณิต สี อัลเบโด้ของพื้นผิว ฯลฯ
ข้อมูลที่รวบรวมมักจะถูกนำมาใช้ในการคำนวณการสร้างใหม่ 3 มิติเพื่อสร้างแบบจำลองดิจิทัลของวัตถุจริงในโลกเสมือนจริง โมเดลเหล่านี้นำไปใช้ในการใช้งานที่หลากหลาย เช่น การออกแบบทางอุตสาหกรรม การตรวจจับข้อบกพร่อง วิศวกรรมย้อนกลับ การสแกนตัวอักษร การแนะนำหุ่นยนต์ ธรณีสัณฐานวิทยา ข้อมูลทางการแพทย์ ข้อมูลทางชีวภาพ การพิสูจน์ตัวตนทางอาญา การรวบรวมมรดกทางดิจิทัล การผลิตภาพยนตร์ และวัสดุในการสร้างเกม
หลักการและคุณลักษณะของเครื่องสแกน 3 มิติแบบไม่สัมผัส
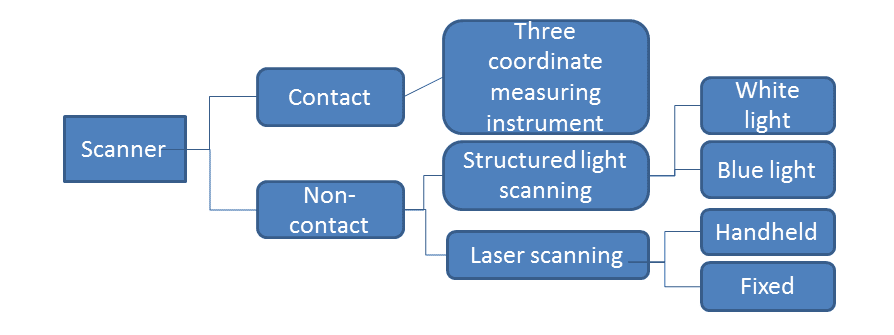
เครื่องสแกน 3 มิติแบบไม่สัมผัส: รวมถึงเครื่องสแกน 3 มิติที่มีโครงสร้างพื้นผิว (หรือที่เรียกว่าเครื่องสแกน 3 มิติแบบพกพาหรือแรสเตอร์) และเครื่องสแกนเลเซอร์
เครื่องสแกนแบบไม่สัมผัสเป็นที่นิยมในหมู่ผู้คนเนื่องจากใช้งานง่าย พกพาสะดวก สแกนได้รวดเร็ว ใช้งานได้ยืดหยุ่น และไม่ทำให้สิ่งของเสียหาย นอกจากนี้ยังเป็นกระแสหลักของการพัฒนาเทคโนโลยีในปัจจุบัน สิ่งที่เราเรียกว่า “เครื่องสแกน 3 มิติ” หมายถึงเครื่องสแกนแบบไม่สัมผัส
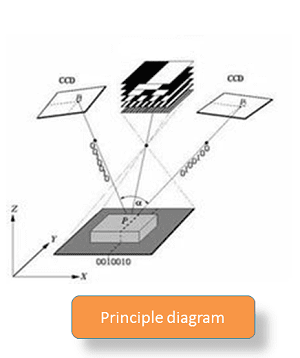
หลักการของเครื่องสแกน 3 มิติแบบมีโครงสร้างแสง
หลักการของเครื่องสแกน 3 มิติแบบใช้แสงที่มีโครงสร้างคล้ายคลึงกับกระบวนการของกล้องที่ถ่ายภาพ เป็นเทคโนโลยีการวัดแบบไม่สัมผัสสามมิติแบบคอมโพสิตที่ผสมผสานเทคโนโลยีแสงเชิงโครงสร้าง เทคโนโลยีการวัดเฟส และเทคโนโลยีการมองเห็นด้วยคอมพิวเตอร์ ในระหว่างการวัด อุปกรณ์ฉายภาพแบบตะแกรงจะฉายแสงที่มีโครงสร้างรหัสเฉพาะจำนวนหนึ่งไปยังวัตถุที่จะทดสอบ และกล้องสองตัวที่มุมหนึ่งจะรับภาพที่สอดคล้องกันพร้อมกัน จากนั้นถอดรหัสและแบ่งเฟสภาพ และใช้เทคนิคการจับคู่และสามเหลี่ยม หลักการวัดใช้ในการคำนวณพิกัดสามมิติของพิกเซลในมุมมองทั่วไปของกล้องทั้งสองตัว
ลักษณะเฉพาะของเครื่องสแกน 3DSS
1. สามารถใช้เลนส์กล้องได้หลายกลุ่ม สามารถสแกนช่วงกว้างได้
2. สามารถสแกนได้ทั้งวัตถุขนาดใหญ่และวัตถุขนาดเล็กที่แม่นยำ
3. เชื่อมต่ออัตโนมัติ รองรับการเลือกข้อมูลที่ดีที่สุดจากข้อมูลคลาวด์จุดที่ทับซ้อนกัน
4. ความเร็วในการสแกนสูง เวลาในการสแกนครั้งเดียวน้อยกว่า 3 วินาที
5. ความแม่นยำสูง การสแกนเพียงครั้งเดียวสามารถรวบรวมคะแนนได้ 1 ล้านคะแนน
6. ไฟล์ข้อมูลเอาต์พุตเช่น GPD/STL/ASC/IGS
7. การใช้แหล่งกำเนิดแสงเย็น LED ความร้อนขนาดเล็ก ประสิทธิภาพมีเสถียรภาพ
8. การสแกนข้อมูลจะถูกบันทึกโดยอัตโนมัติ ไม่ส่งผลต่อเวลาการทำงาน
9. สแกนเนอร์สามารถปรับแต่งได้ตามขนาดของวัตถุ
10. ตัวเครื่องหลักทำจากคาร์บอนไฟเบอร์มีเสถียรภาพทางความร้อนสูงขึ้น
กรณีการสมัคร
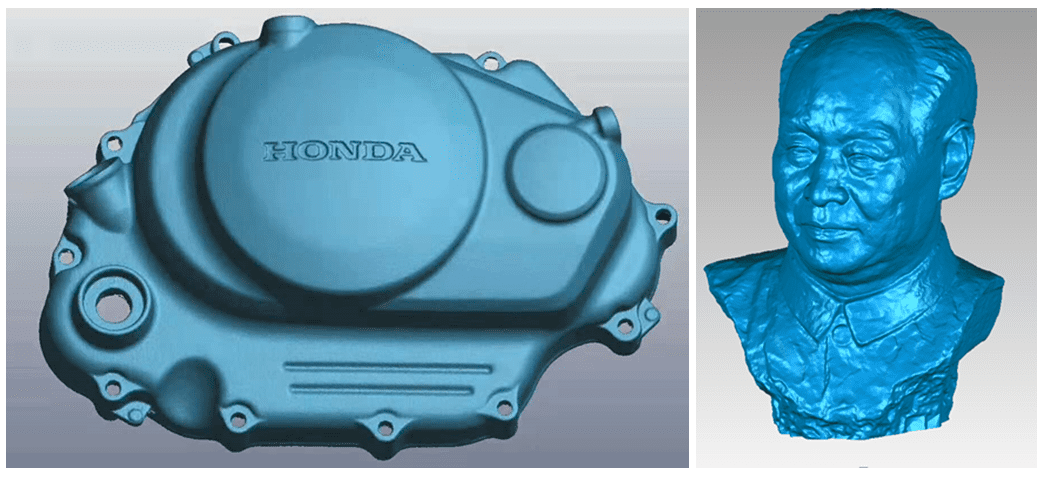
ฟิลด์แอปพลิเคชัน
ช่วงสแกนเดี่ยว: 50 มม. (X) * 40 มม. (Y), 100 มม. * 75 มม. 200 มม.*150 มม.400
มม. * 300 มม.; 800 มม.*600 มม
ความแม่นยำในการสแกนเดี่ยว: ± 0.01 มม. ~ ± 0.05 มม
เวลาสแกนครั้งเดียว: <3 วินาที
ความละเอียดการสแกนครั้งเดียว: 1,310,000
รูปแบบเอาต์พุตพอยต์คลาวด์: GPD/STL/ASC/IGS/WRL
เข้ากันได้กับวิศวกรรมย้อนกลับปกติและซอฟต์แวร์ 3D CAD
เขียนข้อความของคุณที่นี่แล้วส่งมาให้เรา





