




Mirage 4-eye 3D-scanner is uitgerust met 4 groepen cameralenzen, die kunnen worden gekozen en verschoven op basis van de grootte van het object en de gedetailleerde textuur van het objectoppervlak. Grote en kleine nauwkeurige scans kunnen tegelijkertijd worden uitgevoerd zonder de cameralens opnieuw af te stellen of opnieuw af te bakenen. De Mirage 4-eye-serie bevat 3D-scanners met wit licht en blauw licht.
Gestructureerd licht 3D-scanner-3DSS-MIRG4M-III

Korte introductie van 3D-scanner
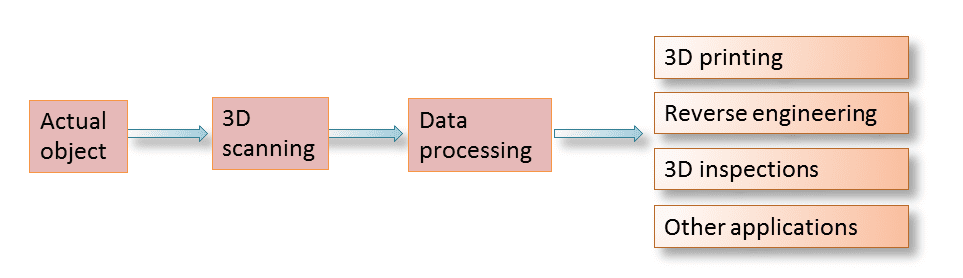
3D-scanner is een wetenschappelijk instrument dat wordt gebruikt om de vorm- en uiterlijkgegevens van objecten of omgevingen in de echte wereld te detecteren en analyseren, inclusief geometrie, kleur, oppervlakte-albedo, enz.
De verzamelde gegevens worden vaak gebruikt om 3D-reconstructieberekeningen uit te voeren om een digitaal model van het daadwerkelijke object in de virtuele wereld te creëren. Deze modellen worden gebruikt in een breed scala aan toepassingen, zoals industrieel ontwerp, foutdetectie, reverse engineering, karakterscannen, robotbegeleiding, geomorfologie, medische informatie, biologische informatie, strafrechtelijke identificatie, verzameling van digitaal erfgoed, filmproductie en materialen voor het maken van games.
Principe en kenmerken van contactloze 3D-scanner
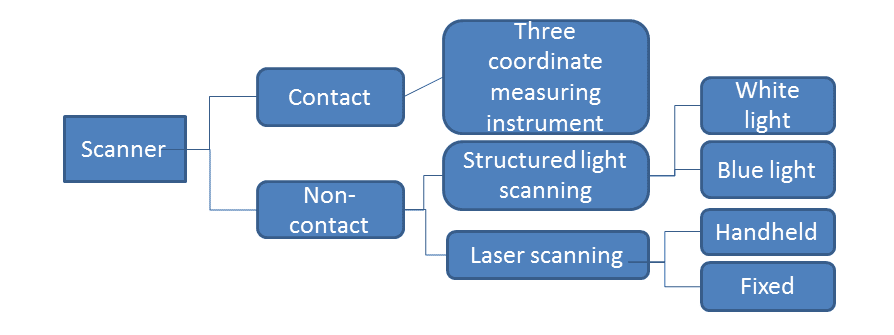
Contactloze 3D-scanner: Inclusief een lichte 3D-scanner met oppervlaktestructuur (ook wel foto- of draagbare of raster-3D-scanner genoemd) en een laserscanner.
De contactloze scanner is populair onder mensen vanwege zijn eenvoudige bediening, gemakkelijk mee te nemen, snel scannen, flexibel gebruik en geen schade aan voorwerpen. Het is ook de hoofdstroom van de huidige technologische ontwikkeling. Wat wij “3D-scanner” noemen, verwijst naar een contactloze scanner.
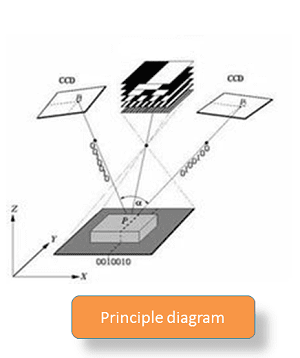
Principe van gestructureerde licht 3D-scanner
Het principe van een gestructureerde lichte 3D-scanner is vergelijkbaar met het proces waarbij een camera een foto maakt. Het is een samengestelde driedimensionale contactloze meettechnologie die structurele lichttechnologie, fasemeettechnologie en computervisietechnologie combineert. Tijdens de meting projecteert het roosterprojectieapparaat een aantal specifiek gecodeerde gestructureerde lichten op het te testen object, en de twee camera's nemen onder een bepaalde hoek synchroon overeenkomstige beelden op, decoderen en faseren vervolgens het beeld, en gebruiken matchingtechnieken en driehoeken. Het meetprincipe wordt gebruikt om de driedimensionale coördinaten van de pixels in het gemeenschappelijke beeld van de twee camera's te berekenen.
Kenmerken van 3DSS-scanners
1. Automatisch samenvoegen, ter ondersteuning van het selecteren van de beste gegevens uit de overlappende puntenwolkgegevens.
2. Hoge scansnelheid, enkele scantijd is minder dan 3 seconden.
3. Hoge precisie, enkele scan kan punten van 1 miljoen verzamelen.
4. De scangegevens worden automatisch opgeslagen, zonder invloed op de bedieningstijd.
5. Goedkeuring van LED-koude lichtbron, kleine hitte, prestaties zijn stabiel.
6. Geschikt voor het scannen van zowel grote objecten als kleine nauwkeurige objecten.
7. Er kunnen twee sets cameralenzen worden gebruikt, u hoeft deze niet opnieuw aan te passen en te kalibreren, handig en tijdbesparend.
8. Voer gegevensbestanden uit zoals GPD/STL/ASC/IGS.
9. De hoofdstructuur is gemaakt van koolstofvezelmateriaal, dat een hogere thermische stabiliteit heeft.
Toepassingsgevallen
Toepassingsgebieden
Enkel scanbereik: 400 mm (X) *300 mm (Y), 100 mm * 80 mm
Enkele scanprecisie: ± 0,03 mm ± 0,01 mm
Enkele scantijd: <3s
Enkele scanresolutie: 1.310.000/3.000.000/5.000.000
Uitvoerformaat puntenwolk: compatibel met GPD/STL/ASC/IGS/WRL
met de normale software van reverse engineering en 3D CAD.
Schrijf hier uw bericht en stuur het naar ons





