




Mirage 4-eye 3D skeneris ir aprīkots ar 4 kameras objektīvu grupām, kuras var izvēlēties un pārvietot atbilstoši objekta izmēram un detalizētai objekta virsmas faktūrai. Lielu un mazu precīzu skenēšanu var veikt vienlaikus bez kameras objektīva pārregulēšanas vai atkārtotas norobežošanas. Mirage 4-eye sērijā ir baltās gaismas un zilās gaismas 3D skeneri.
Strukturēts viegls 3D skeneris-3DSS-MIRG4M-III

Īss 3D skenera ievads
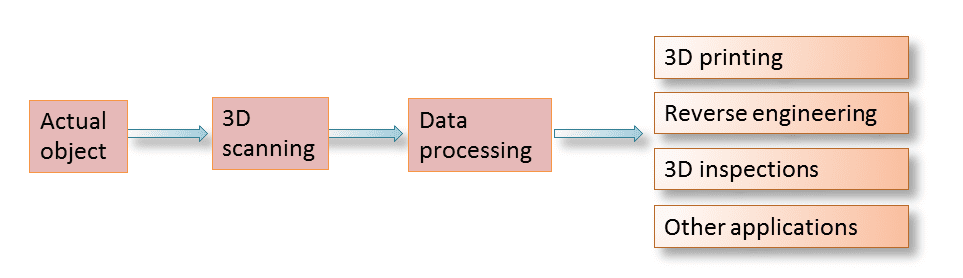
3D skeneris ir zinātnisks instruments, ko izmanto, lai noteiktu un analizētu objektu vai vides formu un izskatu datus reālajā pasaulē, tostarp ģeometriju, krāsu, virsmas albedo utt.
Savāktos datus bieži izmanto, lai veiktu 3D rekonstrukcijas aprēķinus, lai izveidotu reālā objekta digitālo modeli virtuālajā pasaulē. Šie modeļi tiek izmantoti plašā lietojumu klāstā, piemēram, rūpnieciskajā dizainā, defektu noteikšanā, reversajā inženierijā, rakstzīmju skenēšanā, robotu vadīšanā, ģeomorfoloģijā, medicīniskajā informācijā, bioloģiskajā informācijā, noziedzīgā identifikācijā, digitālā mantojuma kolekcijā, filmu ražošanā un spēļu veidošanas materiālos.
Bezkontakta 3D skenera princips un īpašības
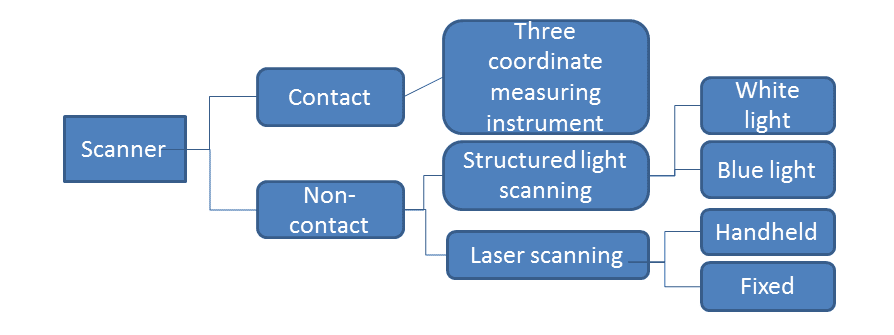
Bezkontakta 3D skeneris: ietver virsmas strukturētu gaismas 3D skeneri (sauktu arī par fotoattēlu vai portatīvo vai rastra 3D skeneri) un lāzera skeneri.
Bezkontakta skeneris ir populārs cilvēku vidū, pateicoties tā vienkāršai darbībai, ērtai pārnēsāšanai, ātrai skenēšanai, elastīgai lietošanai un bez priekšmetu bojājumiem. Tas ir arī pašreizējās tehnoloģiju attīstības galvenais virziens. Tas, ko mēs saucam par “3D skeneri”, attiecas uz bezkontakta skeneri.
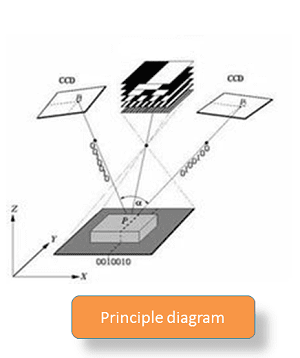
Strukturētās gaismas 3D skenera princips
Strukturēta gaismas 3D skenera darbības princips ir līdzīgs procesam, kad kamera uzņem fotoattēlu. Tā ir salikta trīsdimensiju bezkontakta mērījumu tehnoloģija, kas apvieno strukturālās gaismas tehnoloģiju, fāzes mērīšanas tehnoloģiju un datorredzes tehnoloģiju. Mērīšanas laikā režģa projekcijas ierīce projicē vairākas īpašas kodētas strukturētas gaismas uz pārbaudāmā objekta, un abas kameras noteiktā leņķī sinhroni iegūst atbilstošus attēlus, pēc tam atkodē un fāzē attēlu un izmanto saskaņošanas paņēmienus un trīsstūrus. Mērīšanas princips tiek izmantots, lai aprēķinātu pikseļu trīsdimensiju koordinātas abu kameru kopējā skatā.
3DSS skeneru raksturojums
1. Automātiski savienojiet, atbalstot labāko datu atlasi no pārklāšanās punktu mākoņa datiem.
2. Liels skenēšanas ātrums, vienas skenēšanas laiks ir mazāks par 3 sekundēm.
3. Augstas precizitātes, viena skenēšana var savākt punktus 1 miljona apmērā.
4. Skenēšanas dati tiks saglabāti automātiski, neietekmējot darbības laiku.
5. pieņemot LED aukstās gaismas avotu, mazu siltumu, veiktspēja ir stabila.
6. Spēj skenēt gan lielus objektus, gan mazus precīzus objektus.
7. Var izmantot divus kameru objektīvu komplektus, nav nepieciešams vēlreiz pielāgot un kalibrēt, ērti un laika taupīšana.
8. Izvades datu faili, piemēram, GPD/STL/ASC/IGS.
9. Galvenā struktūra ir izgatavota no oglekļa šķiedras materiāla, kam ir augstāka termiskā stabilitāte.
Pieteikšanās lietas
Pielietojuma lauki
Viena skenēšanas diapazons: 400 mm (X) * 300 mm (Y), 100 mm * 80 mm
Viena skenēšanas precizitāte: ± 0,03 mm ± 0,01 mm
Vienas skenēšanas laiks: <3 s
Vienas skenēšanas izšķirtspēja: 1 310 000/3 000 000/5 000 000
Punktu mākoņa izvades formāts: saderīgs ar GPD/STL/ASC/IGS/WRL
ar parasto reversās inženierijas programmatūru un 3D CAD.
Uzrakstiet savu ziņu šeit un nosūtiet to mums





