




მორგებული 4-თვალიანი 3D სკანერი აღჭურვილია კამერის ლინზების 4 ჯგუფით, რომელთა არჩევა და გადატანა შესაძლებელია ობიექტის ზომისა და ობიექტის ზედაპირის დეტალური ტექსტურის მიხედვით. დიდი და პატარა ზუსტი სკანირება შეიძლება განხორციელდეს ერთდროულად კამერის ლინზების ხელახალი კორექტირებისა და განახლების გარეშე. მორგებული 4-თვალიანი სერია შეიცავს თეთრ შუქს და ლურჯ შუქს 3D სკანერებს.
სტრუქტურირებული მსუბუქი 3D სკანერი- 3DSS-CUST4M-III

3D სკანერის მოკლე შესავალი
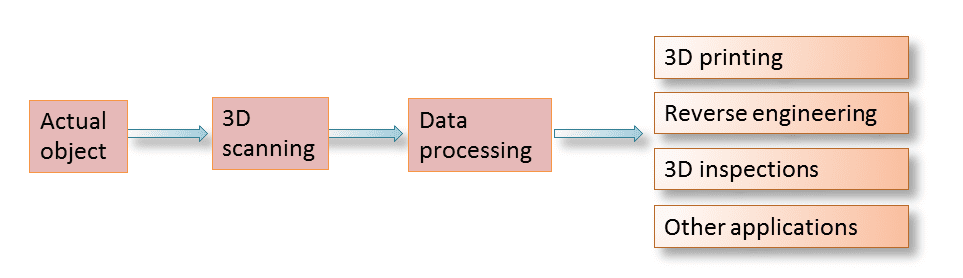
3D სკანერი არის სამეცნიერო ინსტრუმენტი, რომელიც გამოიყენება რეალურ სამყაროში ობიექტების ან გარემოს ფორმისა და გარეგნობის მონაცემების აღმოსაჩენად და გასაანალიზებლად, მათ შორის გეომეტრია, ფერი, ზედაპირის ალბედო და ა.შ.
შეგროვებული მონაცემები ხშირად გამოიყენება 3D რეკონსტრუქციის გამოთვლების შესასრულებლად ვირტუალურ სამყაროში რეალური ობიექტის ციფრული მოდელის შესაქმნელად. ეს მოდელები გამოიყენება აპლიკაციების ფართო სპექტრში, როგორიცაა სამრეწველო დიზაინი, ხარვეზების გამოვლენა, საპირისპირო ინჟინერია, პერსონაჟების სკანირება, რობოტის ხელმძღვანელობა, გეომორფოლოგია, სამედიცინო ინფორმაცია, ბიოლოგიური ინფორმაცია, კრიმინალური იდენტიფიკაცია, ციფრული მემკვიდრეობის კოლექცია, ფილმების წარმოება და თამაშების შექმნის მასალები.
უკონტაქტო 3D სკანერის პრინციპი და მახასიათებლები
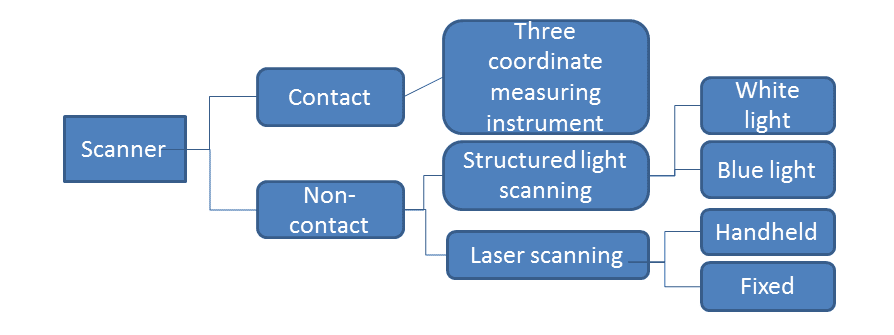
უკონტაქტო 3D სკანერი: მათ შორის ზედაპირული სტრუქტურირებული მსუბუქი 3D სკანერი (ასევე უწოდებენ ფოტო ან პორტატული ან რასტრული 3D სკანერი) და ლაზერული სკანერი.
უკონტაქტო სკანერი პოპულარულია ხალხში მისი მარტივი მუშაობის, მოსახერხებელი ტარების, სწრაფი სკანირების, მოქნილი გამოყენებისა და ნივთების დაზიანების გარეშე. ის ასევე არის მიმდინარე ტექნოლოგიური განვითარების მთავარი გზა. რასაც ჩვენ ვუწოდებთ „3D სკანერს“ ეხება უკონტაქტო სკანერს.
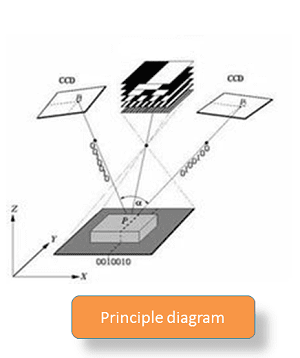
სტრუქტურირებული სინათლის 3D სკანერის პრინციპი
სტრუქტურირებული მსუბუქი 3D სკანერის პრინციპი მსგავსია კამერის ფოტოს გადაღების პროცესის. ეს არის კომპოზიციური სამგანზომილებიანი უკონტაქტო საზომი ტექნოლოგია, რომელიც აერთიანებს სტრუქტურული სინათლის ტექნოლოგიას, ფაზის გაზომვის ტექნოლოგიას და კომპიუტერული ხედვის ტექნოლოგიას. გაზომვის დროს, საპროექციო მოწყობილობა ასახავს სპეციფიკური კოდირებული სტრუქტურირებული განათების სიმრავლეს შესამოწმებელ ობიექტზე და ორი კამერა გარკვეული კუთხით სინქრონულად იძენს შესაბამის სურათებს, შემდეგ დეკოდირებს და ფაზას უკეთებს სურათს და იყენებს შესატყვის ტექნიკას და სამკუთხედებს. გაზომვის პრინციპი გამოიყენება პიქსელების სამგანზომილებიანი კოორდინატების გამოსათვლელად ორი კამერის საერთო ხედში.
3DSS სკანერების მახასიათებლები
1. კამერის ლინზების მრავალი ჯგუფის გამოყენება შესაძლებელია, შესაძლებელია დიდი დიაპაზონის სკანირების განხორციელება.
2. შეუძლია როგორც დიდი, ასევე მცირე ზუსტი ობიექტების სკანირება.
3. შეერთება ავტომატურად, ხელს უწყობს საუკეთესო მონაცემების არჩევას გადახურვის წერტილის ღრუბლის მონაცემებიდან.
4. სკანირების მაღალი სიჩქარე, ერთჯერადი სკანირების დრო 3 წამზე ნაკლებია.
5. მაღალი სიზუსტით, ერთჯერადი სკანირებით შეუძლია შეაგროვოს 1 მილიონი ქულები.
6. გამომავალი მონაცემთა ფაილები, როგორიცაა GPD/STL/ASC/IGS.
7. LED ცივი სინათლის წყაროს მიღება, მცირე სითბო, შესრულება სტაბილურია.
8. სკანირების მონაცემები შეინახება ავტომატურად, არ იმოქმედებს ოპერაციის დროს.
9. სკანერი მორგებულია ობიექტის ზომის მიხედვით.
10. ძირითადი კორპუსი დამზადებულია ნახშირბადის ბოჭკოსგან, უმაღლესი თერმული სტაბილურობით.
განაცხადის საქმეები
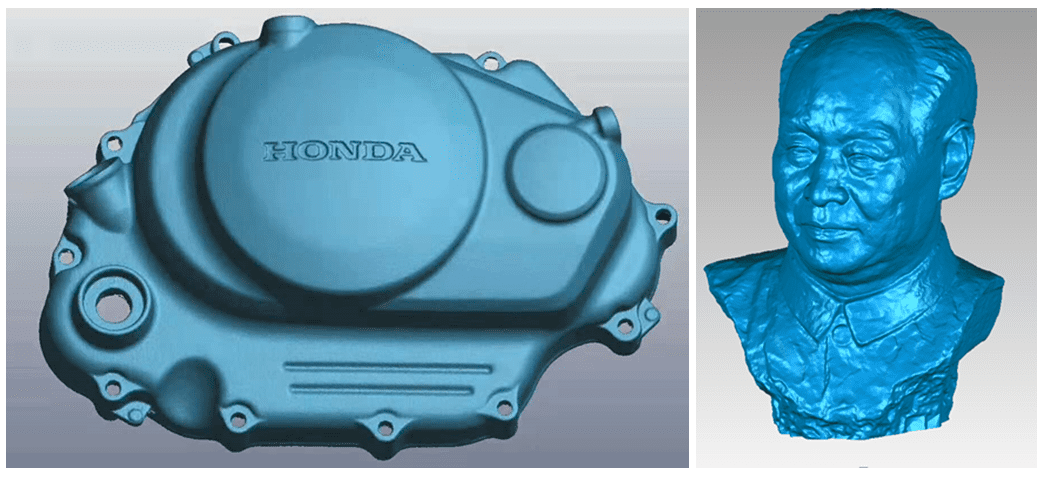
განაცხადის ველები
ერთჯერადი სკანირების დიაპაზონი: 50მმ(X) *40მმ(Y), 100მმ*75მმ; 200 მმ * 150 მმ; 400
მმ*300მმ; 800 მმ * 600 მმ
ერთჯერადი სკანირების სიზუსტე: ± 0,01 მმ ~ ± 0,05 მმ
ერთჯერადი სკანირების დრო: <3 წმ
ერთჯერადი სკანირების გარჩევადობა: 1,310,000
წერტილი ღრუბლის გამომავალი ფორმატი: GPD/STL/ASC/IGS/WRL
თავსებადიანორმალური საპირისპირო ინჟინერია და 3D CAD პროგრამული უზრუნველყოფა
დაწერეთ თქვენი მესიჯი აქ და გამოგვიგზავნეთ





