Hגמיש מאוד, הוא יכול לייצר כל מודל תלת-ממדי מוצק של כל מבנה מורכב, ועלות הייצור כמעט בלתי תלויה במורכבות המוצר.
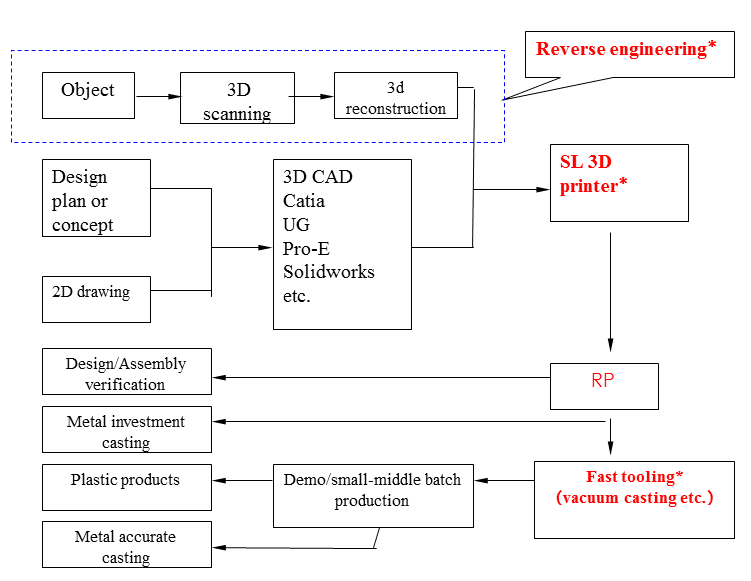
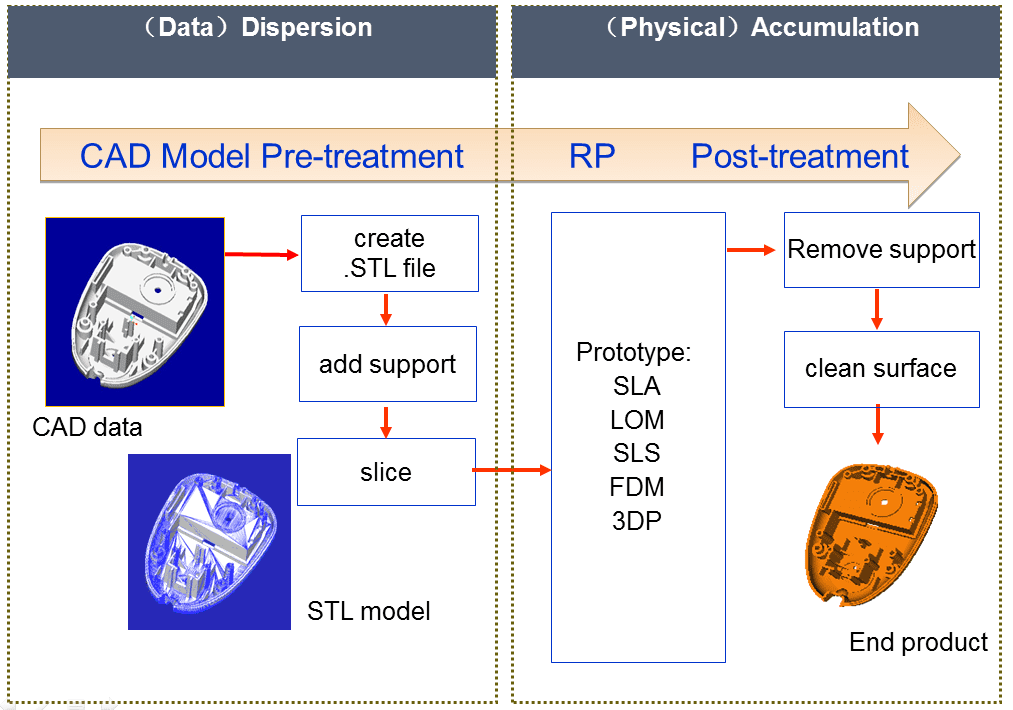
Cנהיגה ישירה מדגם AD, תהליך היציקה דיגיטלי לחלוטין, אין צורך במתקנים או כלים מיוחדים, והתכנון והייצור (CAD/CAM) משולבים מאוד.
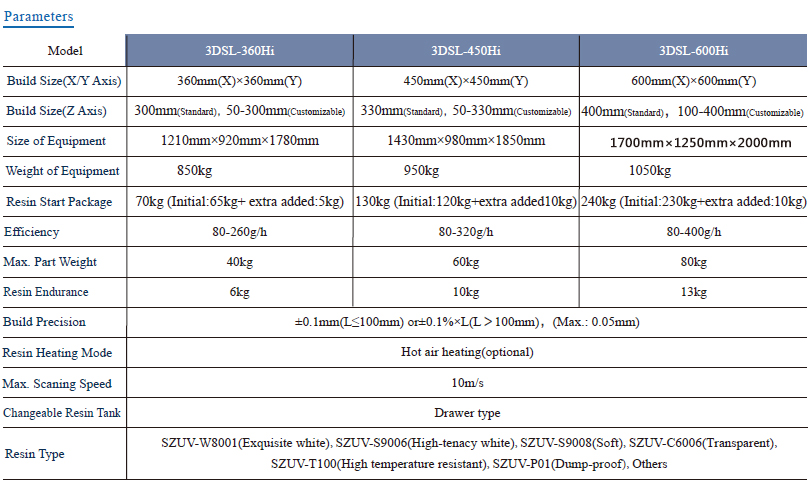
Hדיוק גבוה, ±0.1%
Hרדוקטיבי מאוד, מסוגל ליצור פרטים עדינים מאוד, קירות דקים
Mאיכות פני השטח הישנה מעולה
Fמהירות אסט
Hמאוד אוטומטי: התהליך אוטומטי לחלוטין, התהליך אינו דורש התערבות אנושית, והציוד יכול להיות ללא השגחה