





El mini escàner 3D de 4 ulls està equipat amb 4 grups de lents de càmera, que es poden triar i desplaçar segons la mida de l'objecte i la textura detallada de la superfície de l'objecte. L'escaneig precís gran i petit es pot aconseguir al mateix temps sense reajustament o re-demarcació de la lent de la càmera. La sèrie mini de 4 ulls conté escàners 3D de llum blanca i llum blava.
Escàner 3D de llum estructurada-3DSS-MINI-III

Breu introducció de l'escàner 3D
L'escàner 3D és un instrument científic utilitzat per detectar i analitzar les dades de forma i aparença d'objectes o entorns del món real, com ara la geometria, el color, l'albedo superficial, etc.
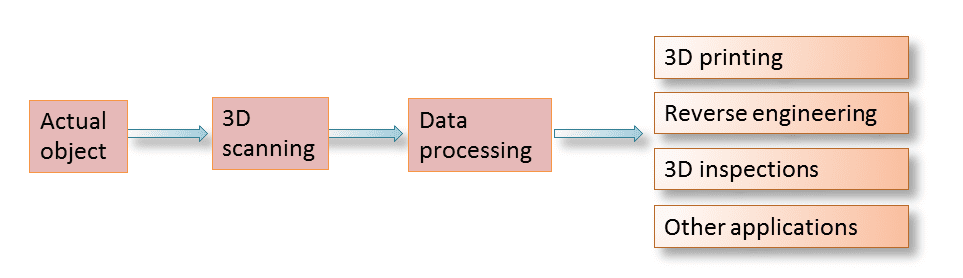
Les dades recollides s'utilitzen sovint per realitzar càlculs de reconstrucció en 3D per crear un model digital de l'objecte real al món virtual. Aquests models s'utilitzen en una àmplia gamma d'aplicacions com ara disseny industrial, detecció de defectes, enginyeria inversa, escaneig de personatges, guia de robots, geomorfologia, informació mèdica, informació biològica, identificació criminal, col·lecció de patrimoni digital, producció de pel·lícules i materials de creació de jocs.
Principi i característiques de l'escàner 3D sense contacte
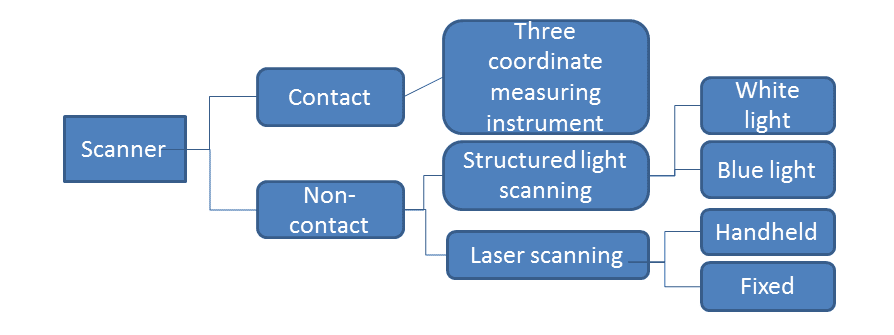
Escàner 3D sense contacte: inclou un escàner 3D de llum estructurada de superfície (també anomenat escàner 3D fotogràfic o portàtil o ràster) i un escàner làser.
L'escàner sense contacte és popular entre la gent pel seu funcionament senzill, transport còmode, escaneig ràpid, ús flexible i sense danys als articles. També és el corrent principal del desenvolupament tecnològic actual. El que anomenem "escàner 3D" es refereix a un escàner sense contacte.
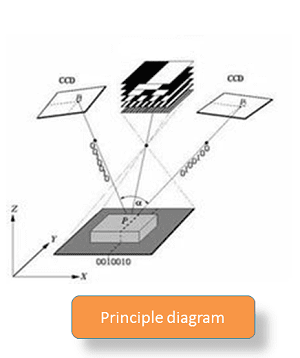
Principi de l'escàner 3D de llum estructurada
El principi d'un escàner 3D de llum estructurada és similar al procés d'una càmera per fer una foto. És una tecnologia de mesura tridimensional composta sense contacte que combina tecnologia de llum estructural, tecnologia de mesura de fase i tecnologia de visió per ordinador. Durant el mesurament, el dispositiu de projecció de reixeta projecta una pluralitat de llums estructurades codificades específiques sobre l'objecte que es vol provar, i les dues càmeres amb un cert angle adquireixen de forma sincrònica les imatges corresponents, després descodifiquen i fa la imatge i utilitzen tècniques i triangles coincidents. El principi de mesura s'utilitza per calcular les coordenades tridimensionals dels píxels a la vista comuna de les dues càmeres.
Característiques dels escàners de la sèrie 3DSS
1. Dissenyat per escanejar objectes petits, pot escanejar clarament la textura de talles de noguera, monedes, etc.
2. Uneix automàticament, donant suport a seleccionar les millors dades de les dades del núvol de punts superposats.
3. Alta precisió, escaneig únic pot recollir punts d'1 milió.
4. Les dades d'escaneig es desaran automàticament, sense afectar el temps de funcionament.
5. Adopció de font de llum freda LED, calor petita, el rendiment és estable.
6. El cos principal està fet de fibra de carboni, l'estabilitat tèrmica és més alta.
7. Fitxers de dades de sortida com ara GPD/STL/ASC/IGS.
Casos d'aplicació

Camps d'aplicació
Interval d'escaneig únic: 100 mm (X) * 75 mm (Y), 50 mm * 40 mm
Precisió d'exploració única: ± 0,01 mm
Temps d'exploració única: <3s
Resolució d'escaneig únic: 1.310.000
Format de sortida del núvol de punts: GPD/STL/ASC/IGS/WRL
compatible amb el programari estàndard d'enginyeria inversa i 3D
Escriu el teu missatge aquí i envia'ns-ho





