Hበትንሹ ተለዋዋጭ ፣ ማንኛውንም ውስብስብ መዋቅር ማንኛውንም 3D ጠንካራ ሞዴሎችን ማምረት ይችላል ፣ እና የምርት ዋጋ ከምርቱ ውስብስብነት ነፃ ነው።
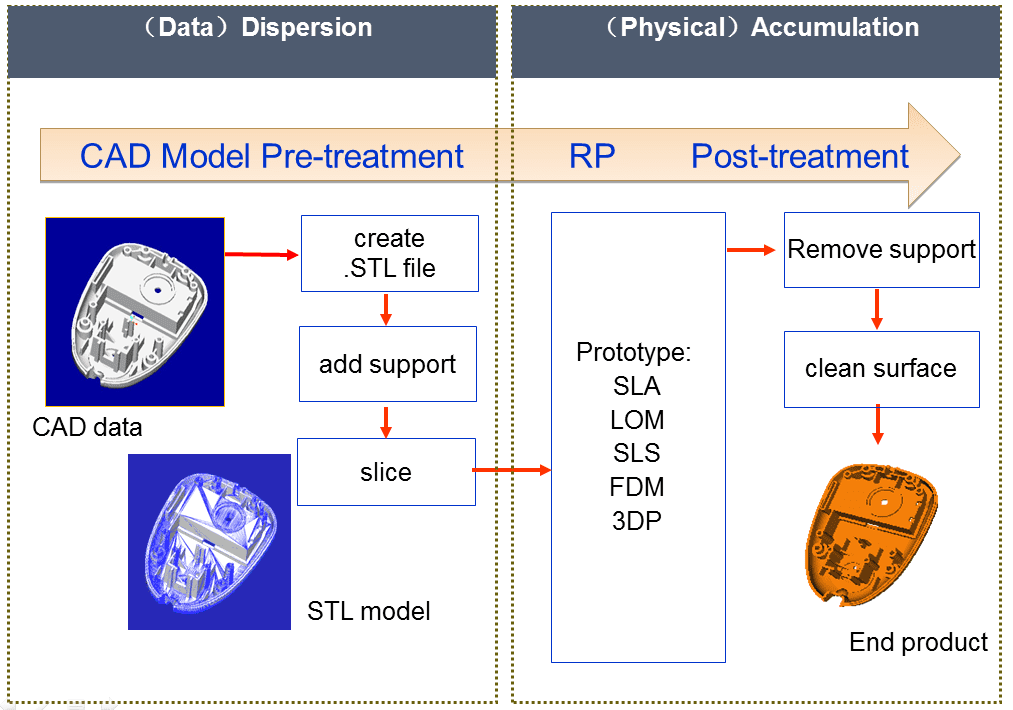
Cየኤ.ዲ. ሞዴል ቀጥታ መንዳት, የመቅረጽ ሂደቱ ሙሉ በሙሉ ዲጂታል ነው, ምንም ልዩ እቃዎች ወይም መሳሪያዎች አያስፈልጉም, እና ዲዛይን እና ማምረቻ (CAD/CAM) በጣም የተዋሃደ ነው.
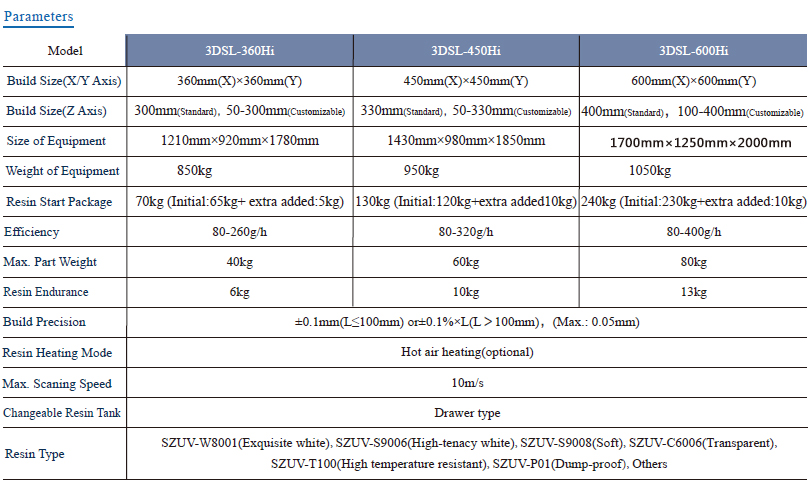
Hትክክለኛ ትክክለኛነት ፣ ± 0.1
Hበደንብ የሚቀንሱ ፣ በጣም ጥሩ ዝርዝሮችን ለመስራት የሚችል ፣ ቀጭን ግድግዳዎች
Mየድሮው ወለል ጥራት በጣም ጥሩ ነው።
Fእንደ ፍጥነት
Hበደካማ አውቶማቲክ: ሂደቱ ሙሉ በሙሉ በራስ-ሰር ነው, ሂደቱ ምንም የሰው ጣልቃገብነት አይፈልግም, እና መሳሪያዎቹ ቁጥጥር ሳይደረግባቸው ሊሆኑ ይችላሉ.